速度规划(梯形、余弦、多项式、7段S型、7段修正S型、15段S型、31段S型) |
您所在的位置:网站首页 › 空客s速度 f速度 › 速度规划(梯形、余弦、多项式、7段S型、7段修正S型、15段S型、31段S型) |
速度规划(梯形、余弦、多项式、7段S型、7段修正S型、15段S型、31段S型)
|
文章目录
一、7种速度规划对比1、梯形速度规划1.1 只有一段1.1.1 加速段1.1.2匀速段1.1.3减速段
1.2 只有两段1.2.1 加速段+匀速段1.2.2匀速段 +减速段1.2.3加速段+减速段
1.3 有三段(加速段+匀速段 +减速段)
2、余弦速度规划2.1 只有一段2.1.1 加速段2.1.2 匀速段2.1.3 减速段
2.2 只有两段2.2.1 加速段+匀速段2.2.2 匀速段+减速段2.2.2 加速段+减速段
2.3 有三段(加速段+匀速段 +减速段)
3、多项式速度规划3.1 只有一段3.1.1 加速段3.1.2 匀速段3.1.3 减速段
2.2 只有两段3.2.1 加速段+匀速段3.2.2 匀速段+减速段3.2.2 加速段+减速段
3.3 有三段(加速段+匀速段 +减速段)
4、7段S型速度规划4.1 只有加速段4.1.1 无匀加速段4.1.2 有匀加速段
4.2 只有匀速段4.3 只有减速段4.3.1 无匀减速段4.3.2 有匀减速段
4.4 只有加速段+匀速段4.4.1 无匀加速段4.4.2 有匀加速段
4.5 只有匀速段+减速段4.5.1 无匀减速段4.5.2 有匀减速段
4.6 只有加速段+减速段4.6.1 无匀加速段、无匀减速段4.6.2 有匀加速段、无匀减速段4.6.3 无匀加速段、有匀减速段4.6.4有匀加速段、有匀减速段
4.7 加速段+匀速段+减速段4.7.1 无匀加速段、无匀减速段4.7.2 有匀加速段、无匀减速段4.7.3 无匀加速段、有匀减速段4.7.4有匀加速段、有匀减速段
5、7段修正S型速度规划5.1 只有加速段5.1.1 无匀加速段5.1.2 有匀加速段
5.2 只有匀速段5.3 只有减速段5.3.1 无匀减速段5.3.2 有匀减速段
5.4 只有加速段+匀速段5.4.1 无匀加速段5.4.2 有匀加速段
5.5 只有匀速段+减速段5.5.1 无匀减速段5.5.2 有匀减速段
5.6 只有加速段+减速段5.6.1 无匀加速段、无匀减速段5.6.2 有匀加速段、无匀减速段5.6.3 无匀加速段、有匀减速段5.6.4有匀加速段、有匀减速段
5.7 加速段+匀速段+减速段5.7.1 无匀加速段、无匀减速段5.7.2 有匀加速段、无匀减速段5.7.3 无匀加速段、有匀减速段5.7.4有匀加速段、有匀减速段
6、15段S型速度规划7、31段S型速度规划
二、7种速度规划示例演示
一、7种速度规划对比
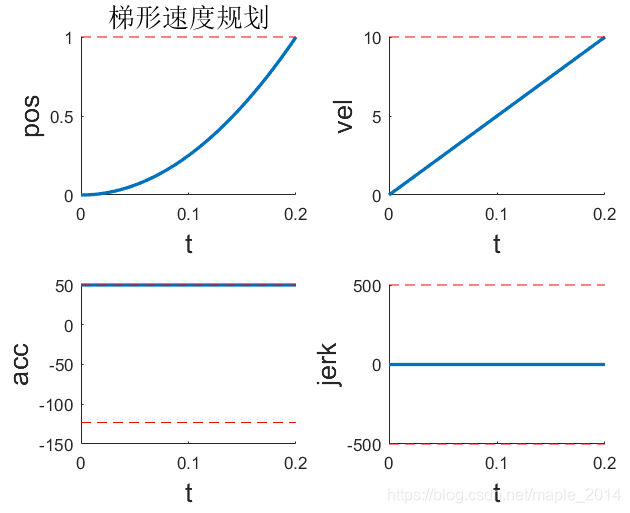
一般地,速度规划输入参数为:长度 L L L,起始速度 v s v_s vs,结束速度 v e v_e ve,最大速度 v c v_c vc,加速度 a c c acc acc,减速度 d e c dec dec,二次加速度 j e r k jerk jerk,三次加速度 s n a p snap snap,四次加速度 c r a c k l e crackle crackle。下面通过对比7种速度规划生成的位置、速度、加速度、二次加速度、三次加速度及四次加速度曲线的连续性与平滑性,可控性(是否可以限制在给定值以内),规划总时间长短,算法计算量四个方面来比较7种速度规划算法。 1、梯形速度规划(1) 位置平滑,速度连续但不平滑,加速度跳变,二次加速度出现无穷大跳变; (2) 速度、加速度可控,更高阶不可控; (3) 所有速度规划算法中规划时间最短; (4) 算法最简单、计算量最小。 1.1 只有一段 1.1.1 加速段 当
L
=
1
,
v
s
=
0
,
v
c
=
10
,
v
e
=
10
,
a
c
c
=
50
,
d
e
c
=
123
(
任
意
)
L=1, v_s=0, v_c=10, v_e=10, acc =50, dec=123(任意)
L=1,vs=0,vc=10,ve=10,acc=50,dec=123(任意)时,只有加速段。 当
L
=
1
,
v
s
=
1
,
v
c
=
1
,
v
e
=
1
,
a
c
c
=
123
(
任
意
)
,
d
e
c
=
123
(
任
意
)
L=1, v_s=1, v_c=1, v_e=1, acc =123(任意), dec=123(任意)
L=1,vs=1,vc=1,ve=1,acc=123(任意),dec=123(任意)时,只有匀速段。 当
L
=
1
,
v
s
=
10
,
v
c
=
10
,
v
e
=
0
,
a
c
c
=
123
(
任
意
)
,
d
e
c
=
50
L=1, v_s=10, v_c=10, v_e=0, acc =123(任意), dec=50
L=1,vs=10,vc=10,ve=0,acc=123(任意),dec=50时,只有减速段。 当
L
=
1
,
v
s
=
0
,
v
c
=
10
,
v
e
=
10
,
a
c
c
=
80
,
d
e
c
=
123
(
任
意
)
L=1, v_s=0, v_c=10, v_e=10, acc =80, dec=123(任意)
L=1,vs=0,vc=10,ve=10,acc=80,dec=123(任意)时,只有加速段+匀速段 。 当
L
=
1
,
v
s
=
10
,
v
c
=
10
,
v
e
=
0
,
a
c
c
=
123
(
任
意
)
,
d
e
c
=
80
L=1, v_s=10, v_c=10, v_e=0, acc =123(任意), dec=80
L=1,vs=10,vc=10,ve=0,acc=123(任意),dec=80时,只有匀速段 +减速段。 当
L
=
1
,
v
s
=
1
,
v
c
=
6
,
v
e
=
2
,
a
c
c
=
20
,
d
e
c
=
30
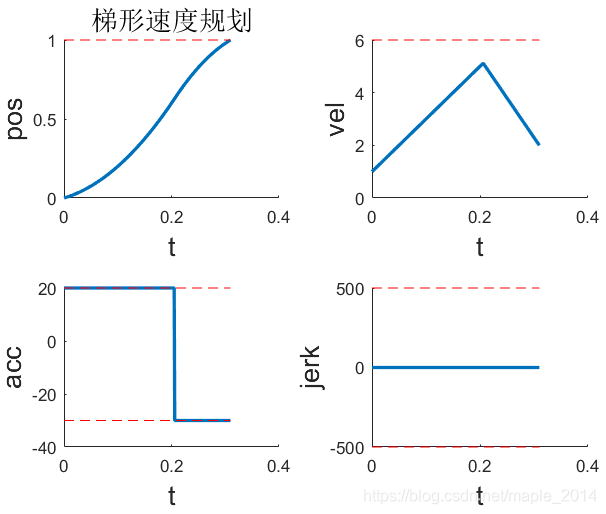
L=1, v_s=1, v_c=6, v_e=2, acc =20,dec=30
L=1,vs=1,vc=6,ve=2,acc=20,dec=30时,只有加速段+减速段 。 当
L
=
1
,
v
s
=
1
,
v
c
=
3
,
v
e
=
2
,
a
c
c
=
40
,
d
e
c
=
30
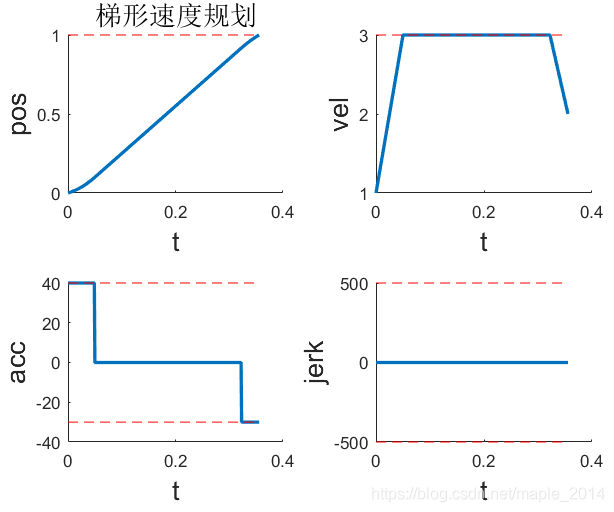
L=1, v_s=1, v_c=3, v_e=2, acc =40 ,dec=30
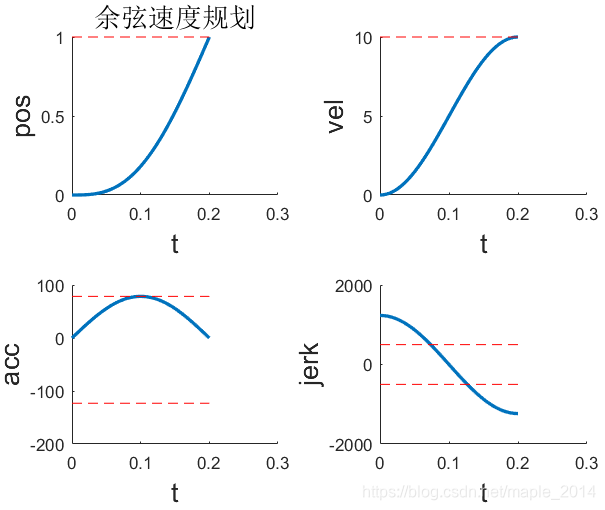
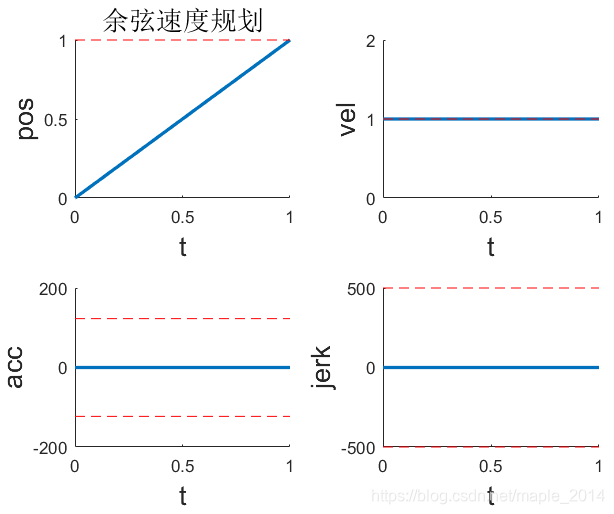
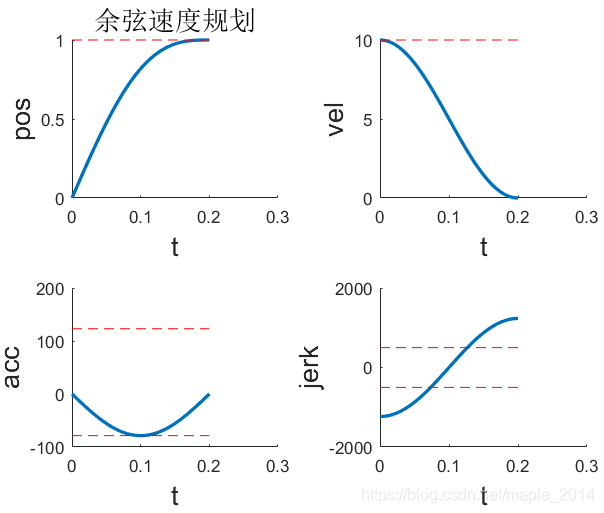
L=1,vs=1,vc=3,ve=2,acc=40,dec=30时,有加速段+匀速段 +减速段。 (1) 位置平滑,速度平滑,加速度连续但不够平滑,二次加速度跳变; (2) 速度、加速度可控,更高阶不可控; (3) 规划时间较长; (4) 算法较简单、计算量较小。 2.1 只有一段 2.1.1 加速段 当
L
=
1
,
v
s
=
0
,
v
c
=
10
,
v
e
=
10
,
a
c
c
=
78.5398
,
d
e
c
=
123
(
任
意
)
L=1, v_s=0, v_c=10, v_e=10, acc =78.5398, dec=123(任意)
L=1,vs=0,vc=10,ve=10,acc=78.5398,dec=123(任意)时,只有加速段。 当
L
=
1
,
v
s
=
1
,
v
c
=
1
,
v
e
=
1
,
a
c
c
=
123
(
任
意
)
,
d
e
c
=
123
(
任
意
)
L=1, v_s=1, v_c=1, v_e=1, acc =123(任意), dec=123(任意)
L=1,vs=1,vc=1,ve=1,acc=123(任意),dec=123(任意)时,只有匀速段。 当$L=1, v_s=10, v_c=10, v_e=0, acc =123(任意), dec=78.5398时,只有减速段。 当
L
=
1
,
v
s
=
0
,
v
c
=
10
,
v
e
=
10
,
a
c
c
=
100
,
d
e
c
=
123
(
任
意
)
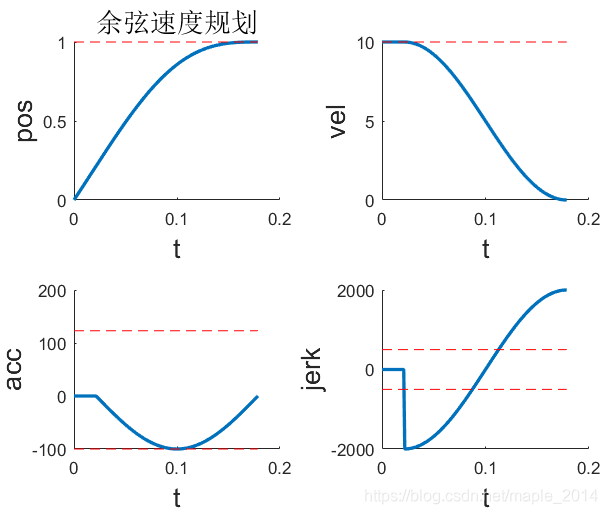
L=1, v_s=0, v_c=10, v_e=10, acc =100, dec=123(任意)
L=1,vs=0,vc=10,ve=10,acc=100,dec=123(任意)时,只有加速段+匀速段 。 当
L
=
1
,
v
s
=
10
,
v
c
=
10
,
v
e
=
0
,
a
c
c
=
123
(
任
意
)
,
d
e
c
=
100
L=1, v_s=10, v_c=10, v_e=0, acc =123(任意), dec=100
L=1,vs=10,vc=10,ve=0,acc=123(任意),dec=100时,只有匀速段 +减速段。 当
L
=
1
,
v
s
=
1
,
v
c
=
6
,
v
e
=
2
,
a
c
c
=
20
,
d
e
c
=
30
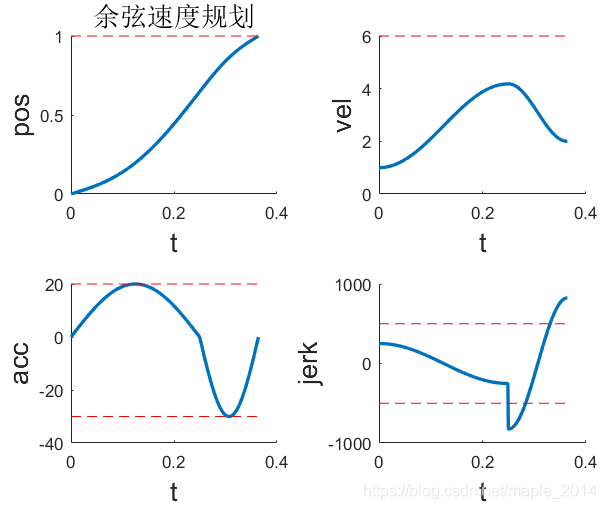
L=1, v_s=1, v_c=6, v_e=2, acc =20, dec=30
L=1,vs=1,vc=6,ve=2,acc=20,dec=30时,只有加速段+减速段 。 当
L
=
1
,
v
s
=
1
,
v
c
=
3
,
v
e
=
2
,
a
c
c
=
40
,
d
e
c
=
30
L=1, v_s=1, v_c=3, v_e=2, acc =40 ,dec=30
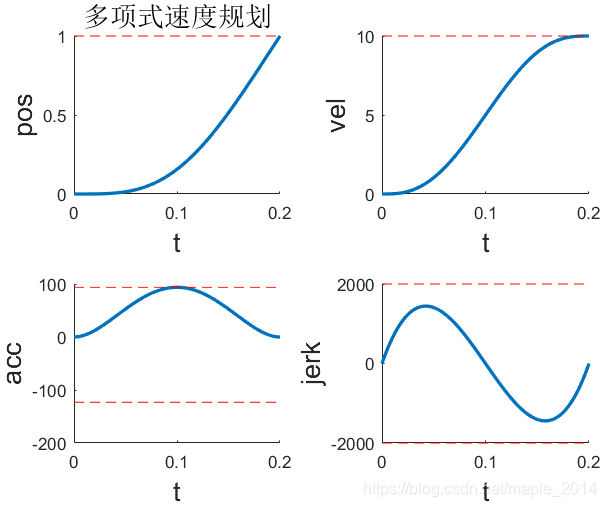
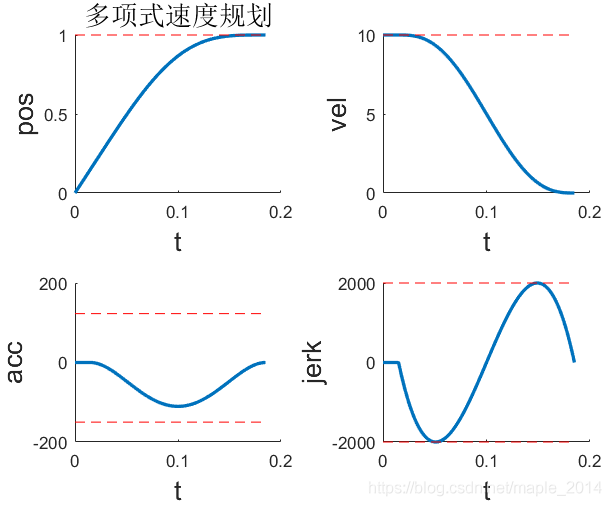
L=1,vs=1,vc=3,ve=2,acc=40,dec=30时,有加速段+匀速段 +减速段。 (1) 位置平滑,速度平滑,加速度平滑,二次加速度连续但不够平滑,三次加速度跳变; (2) 速度、加速度、二次加速度可控,更高阶不可控; (3) 规划时间长; (4) 算法较简单、计算量较小。 3.1 只有一段 3.1.1 加速段 当
L
=
1
,
v
s
=
0
,
v
c
=
10
,
v
e
=
10
,
a
c
c
=
93.75
,
d
e
c
=
123
(
任
意
)
,
j
e
r
k
=
2000
L=1, v_s=0, v_c=10, v_e=10, acc =93.75, dec=123(任意),jerk=2000
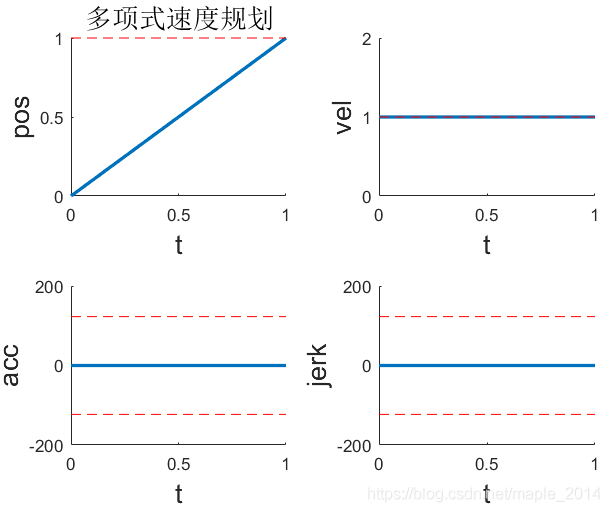
L=1,vs=0,vc=10,ve=10,acc=93.75,dec=123(任意),jerk=2000时,只有加速段。 当
L
=
1
,
v
s
=
1
,
v
c
=
1
,
v
e
=
1
,
a
c
c
=
123
(
任
意
)
,
d
e
c
=
123
(
任
意
)
,
j
e
r
k
=
123
(
任
意
)
L=1, v_s=1, v_c=1, v_e=1, acc =123(任意), dec=123(任意), jerk=123(任意)
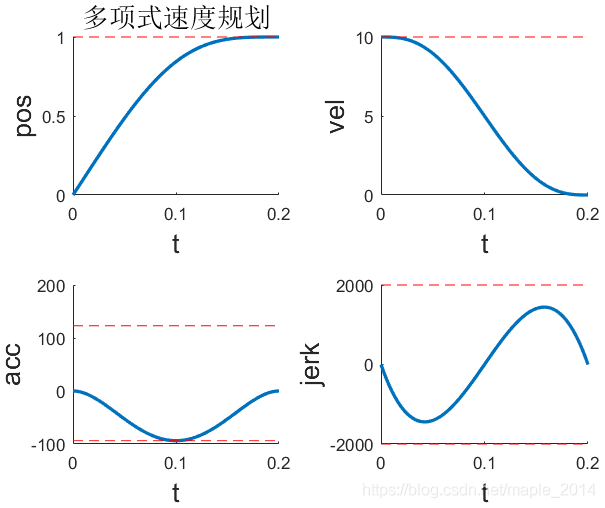
L=1,vs=1,vc=1,ve=1,acc=123(任意),dec=123(任意),jerk=123(任意)时,只有匀速段。 当
L
=
1
,
v
s
=
10
,
v
c
=
10
,
v
e
=
0
,
a
c
c
=
123
(
任
意
)
,
d
e
c
=
93.75
,
j
e
r
k
=
2000
L=1, v_s=10, v_c=10, v_e=0, acc =123(任意), dec=93.75,jerk=2000
L=1,vs=10,vc=10,ve=0,acc=123(任意),dec=93.75,jerk=2000时,只有减速段。 当
L
=
1
,
v
s
=
0
,
v
c
=
10
,
v
e
=
10
,
a
c
c
=
150
,
d
e
c
=
123
(
任
意
)
,
j
e
r
k
=
2000
L=1, v_s=0, v_c=10, v_e=10, acc =150, dec=123(任意),jerk=2000
L=1,vs=0,vc=10,ve=10,acc=150,dec=123(任意),jerk=2000时,只有加速段+匀速段 。 当
L
=
1
,
v
s
=
10
,
v
c
=
10
,
v
e
=
0
,
a
c
c
=
123
(
任
意
)
,
d
e
c
=
150
,
j
e
r
k
=
2000
L=1, v_s=10, v_c=10, v_e=0, acc =123(任意), dec=150,jerk=2000
L=1,vs=10,vc=10,ve=0,acc=123(任意),dec=150,jerk=2000时,只有匀速段 +减速段。 当
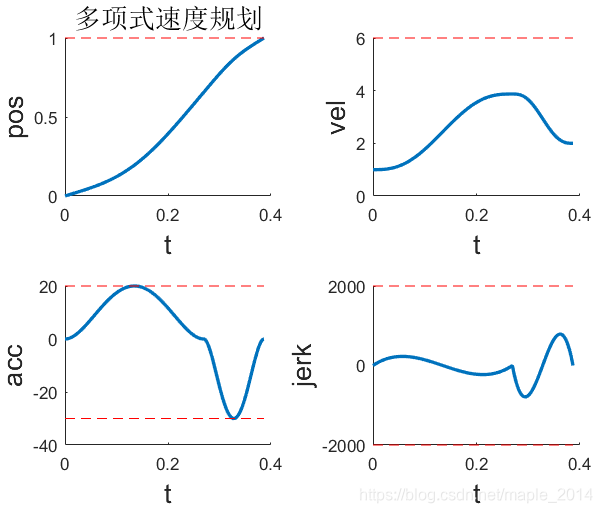
L
=
1
,
v
s
=
1
,
v
c
=
6
,
v
e
=
2
,
a
c
c
=
20
,
d
e
c
=
30
,
j
e
r
k
=
2000
L=1, v_s=1, v_c=6, v_e=2, acc =20,dec=30,jerk=2000
L=1,vs=1,vc=6,ve=2,acc=20,dec=30,jerk=2000时,只有加速段+减速段 。 当
L
=
1
,
v
s
=
1
,
v
c
=
3
,
v
e
=
2
,
a
c
c
=
40
,
d
e
c
=
30
,
j
e
r
k
=
2000
L=1, v_s=1, v_c=3, v_e=2, acc =40 ,dec=30,jerk=2000
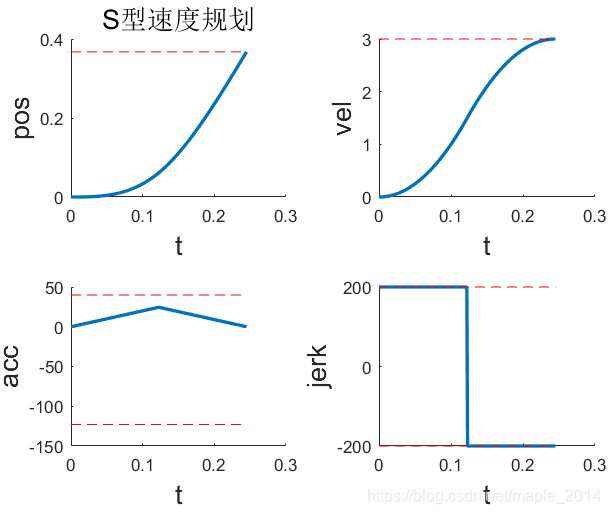
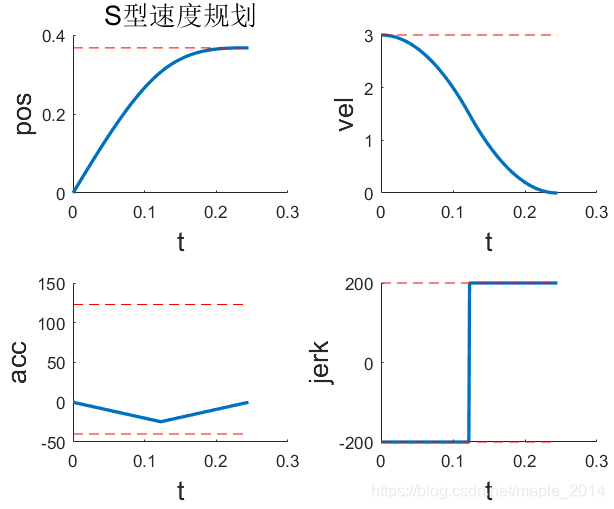
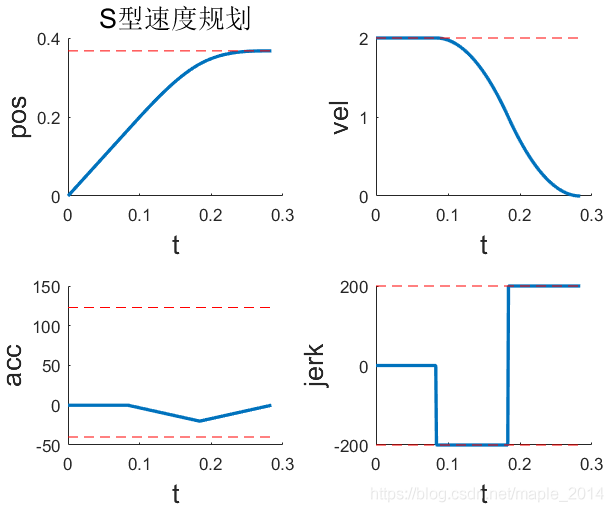
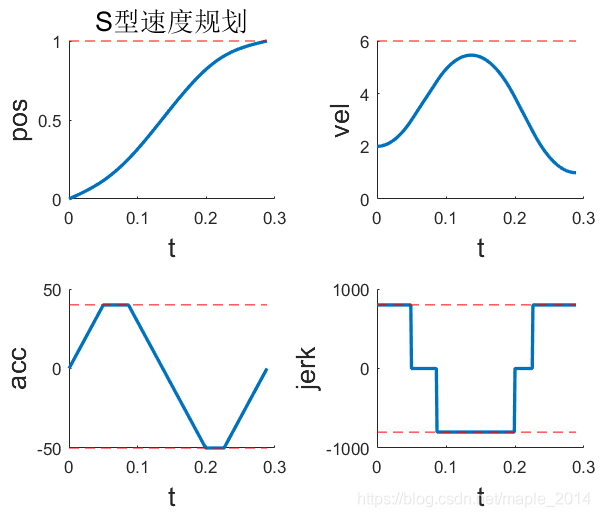
L=1,vs=1,vc=3,ve=2,acc=40,dec=30,jerk=2000时,有加速段+匀速段 +减速段。 (1) 位置平滑,速度平滑,加速度连续但不平滑,二次加速度跳变; (2) 速度、加速度、二次加速度可控,更高阶不可控; (3) 规划时间较短; (4) 算法稍复杂、计算量稍大。 4.1 只有加速段 4.1.1 无匀加速段
L
=
0.36742346
,
v
s
=
0
,
v
c
=
3
,
v
e
=
3
,
a
c
c
=
40
,
d
e
c
=
123
(
任
意
)
,
j
e
r
k
=
200
L=0.36742346, v_s=0, v_c=3, v_e=3, acc =40 ,dec=123(任意),jerk=200
L=0.36742346,vs=0,vc=3,ve=3,acc=40,dec=123(任意),jerk=200
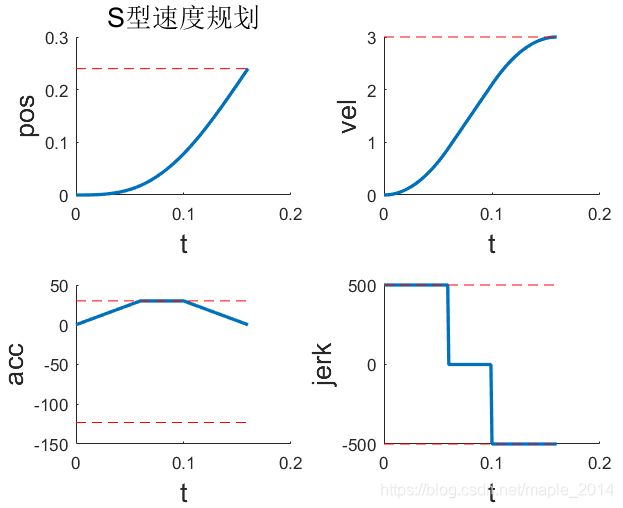
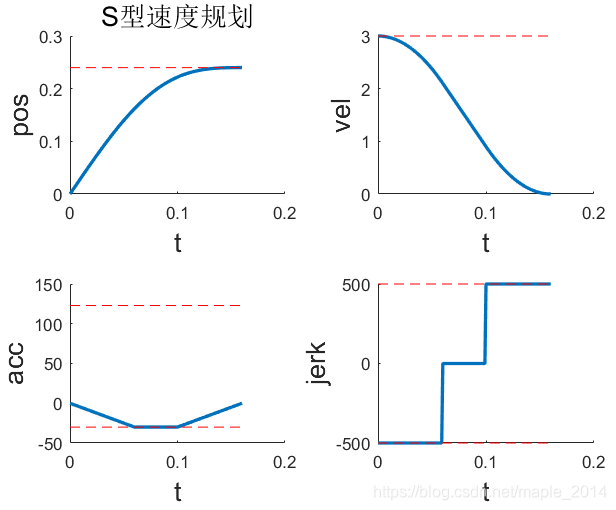
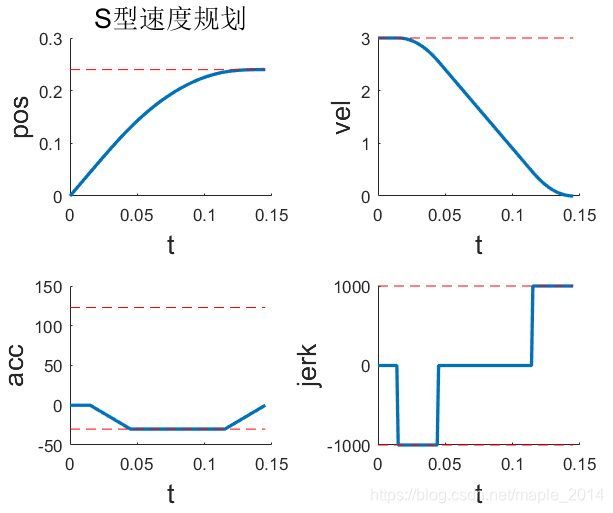
L
=
0.24
,
v
s
=
0
,
v
c
=
3
,
v
e
=
3
,
a
c
c
=
30
,
d
e
c
=
123
(
任
意
)
,
j
e
r
k
=
500
L=0.24, v_s=0, v_c=3, v_e=3, acc =30 ,dec=123(任意),jerk=500
L=0.24,vs=0,vc=3,ve=3,acc=30,dec=123(任意),jerk=500
L
=
1
,
v
s
=
1
,
v
c
=
1
,
v
e
=
1
,
a
c
c
=
123
(
任
意
)
,
d
e
c
=
123
(
任
意
)
,
j
e
r
k
=
123
(
任
意
)
L=1, v_s=1, v_c=1, v_e=1, acc =123(任意), dec=123(任意), jerk=123(任意)
L=1,vs=1,vc=1,ve=1,acc=123(任意),dec=123(任意),jerk=123(任意)
L
=
0.36742346
,
v
s
=
3
,
v
c
=
3
,
v
e
=
0
,
a
c
c
=
123
(
任
意
)
,
d
e
c
=
40
,
j
e
r
k
=
200
L=0.36742346, v_s=3, v_c=3, v_e=0, acc =123(任意) ,dec=40,jerk=200
L=0.36742346,vs=3,vc=3,ve=0,acc=123(任意),dec=40,jerk=200
L
=
0.24
,
v
s
=
3
,
v
c
=
3
,
v
e
=
0
,
a
c
c
=
123
(
任
意
)
,
d
e
c
=
30
,
j
e
r
k
=
500
L=0.24, v_s=3, v_c=3, v_e=0, acc =123(任意) ,dec=30,jerk=500
L=0.24,vs=3,vc=3,ve=0,acc=123(任意),dec=30,jerk=500
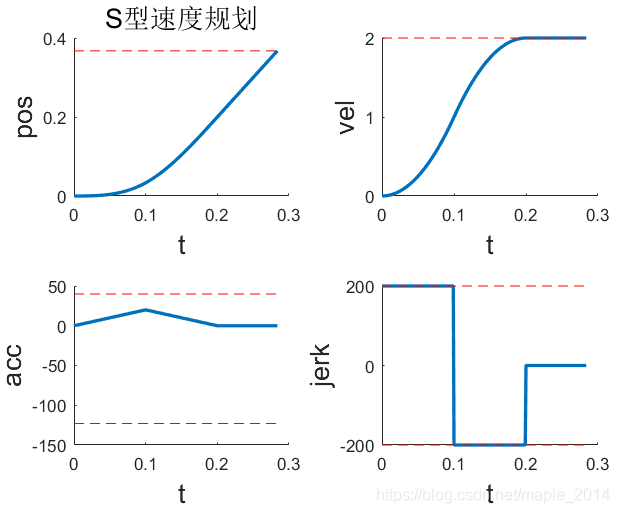
L
=
0.36742346
,
v
s
=
0
,
v
c
=
2
,
v
e
=
2
,
a
c
c
=
40
,
d
e
c
=
123
(
任
意
)
,
j
e
r
k
=
200
L=0.36742346, v_s=0, v_c=2, v_e=2, acc =40 ,dec=123(任意),jerk=200
L=0.36742346,vs=0,vc=2,ve=2,acc=40,dec=123(任意),jerk=200
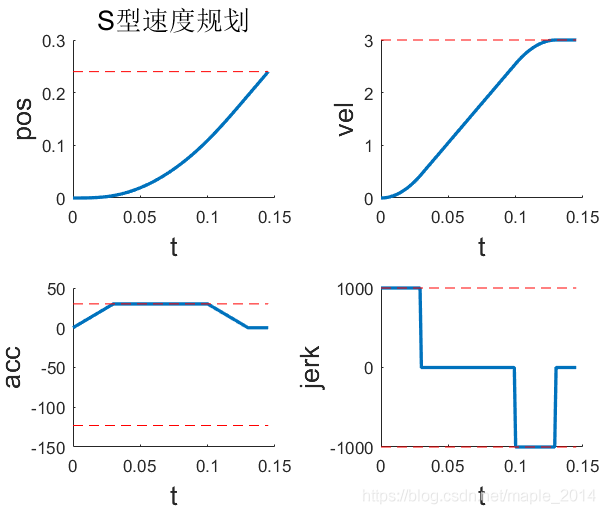
L
=
0.24
,
v
s
=
0
,
v
c
=
3
,
v
e
=
3
,
a
c
c
=
30
,
d
e
c
=
123
(
任
意
)
,
j
e
r
k
=
1000
L=0.24, v_s=0, v_c=3, v_e=3, acc =30 ,dec=123(任意),jerk=1000
L=0.24,vs=0,vc=3,ve=3,acc=30,dec=123(任意),jerk=1000
L
=
0.36742346
,
v
s
=
2
,
v
c
=
2
,
v
e
=
0
,
a
c
c
=
123
(
任
意
)
,
d
e
c
=
40
,
j
e
r
k
=
200
L=0.36742346, v_s=2, v_c=2, v_e=0, acc =123(任意) ,dec=40,jerk=200
L=0.36742346,vs=2,vc=2,ve=0,acc=123(任意),dec=40,jerk=200
L
=
0.24
,
v
s
=
3
,
v
c
=
3
,
v
e
=
0
,
a
c
c
=
123
(
任
意
)
,
d
e
c
=
30
,
j
e
r
k
=
1000
L=0.24, v_s=3, v_c=3, v_e=0, acc =123(任意) ,dec=30,jerk=1000
L=0.24,vs=3,vc=3,ve=0,acc=123(任意),dec=30,jerk=1000
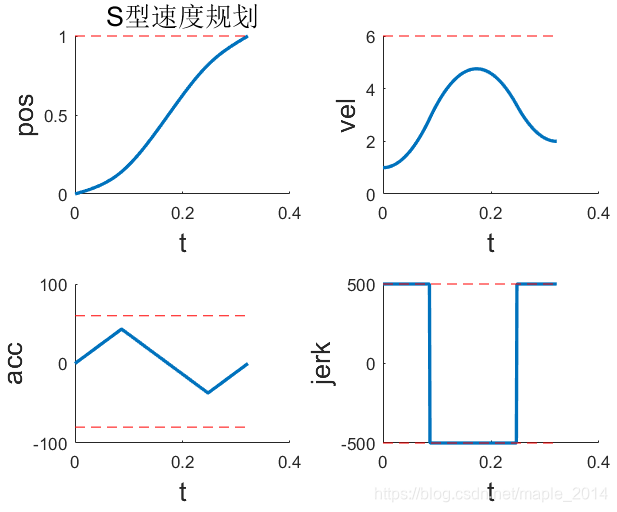
L
=
1
,
v
s
=
1
,
v
c
=
6
,
v
e
=
2
,
a
c
c
=
60
,
d
e
c
=
80
,
j
e
r
k
=
500
L=1, v_s=1, v_c=6, v_e=2, acc =60 ,dec=80,jerk=500
L=1,vs=1,vc=6,ve=2,acc=60,dec=80,jerk=500
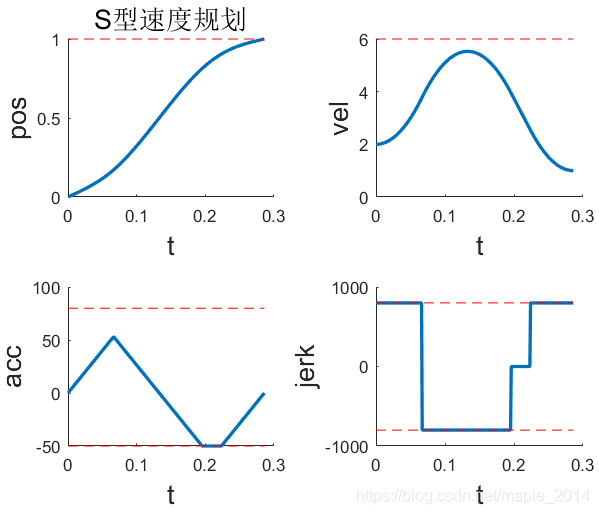
L
=
1
,
v
s
=
1
,
v
c
=
6
,
v
e
=
2
,
a
c
c
=
50
,
d
e
c
=
80
,
j
e
r
k
=
800
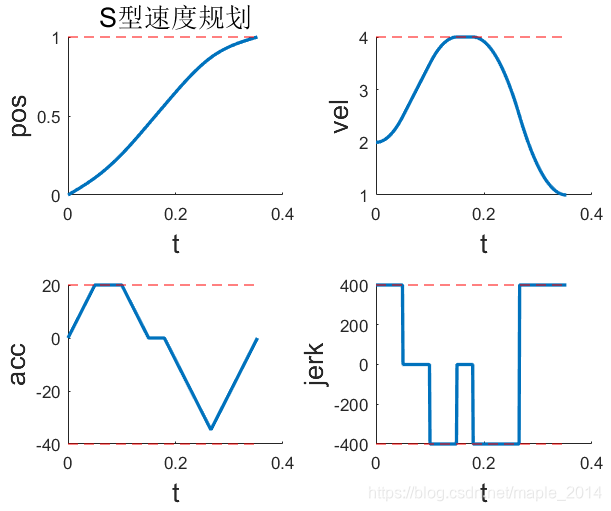
L=1, v_s=1, v_c=6, v_e=2, acc =50 ,dec=80,jerk=800
L=1,vs=1,vc=6,ve=2,acc=50,dec=80,jerk=800
L
=
1
,
v
s
=
2
,
v
c
=
6
,
v
e
=
1
,
a
c
c
=
80
,
d
e
c
=
60
,
j
e
r
k
=
800
L=1, v_s=2, v_c=6, v_e=1, acc =80 ,dec=60,jerk=800
L=1,vs=2,vc=6,ve=1,acc=80,dec=60,jerk=800
L
=
1
,
v
s
=
2
,
v
c
=
6
,
v
e
=
1
,
a
c
c
=
40
,
d
e
c
=
50
,
j
e
r
k
=
800
L=1, v_s=2, v_c=6, v_e=1, acc =40 ,dec=50,jerk=800
L=1,vs=2,vc=6,ve=1,acc=40,dec=50,jerk=800
L
=
1
,
v
s
=
2
,
v
c
=
4
,
v
e
=
1
,
a
c
c
=
40
,
d
e
c
=
50
,
j
e
r
k
=
400
L=1, v_s=2, v_c=4, v_e=1, acc =40 ,dec=50,jerk=400
L=1,vs=2,vc=4,ve=1,acc=40,dec=50,jerk=400
L
=
1
,
v
s
=
2
,
v
c
=
4
,
v
e
=
1
,
a
c
c
=
20
,
d
e
c
=
40
,
j
e
r
k
=
400
L=1, v_s=2, v_c=4, v_e=1, acc =20 ,dec=40,jerk=400
L=1,vs=2,vc=4,ve=1,acc=20,dec=40,jerk=400
L
=
1
,
v
s
=
2
,
v
c
=
4
,
v
e
=
1
,
a
c
c
=
40
,
d
e
c
=
30
,
j
e
r
k
=
400
L=1, v_s=2, v_c=4, v_e=1, acc =40 ,dec=30,jerk=400
L=1,vs=2,vc=4,ve=1,acc=40,dec=30,jerk=400
L
=
1
,
v
s
=
2
,
v
c
=
4
,
v
e
=
1
,
a
c
c
=
30
,
d
e
c
=
40
,
j
e
r
k
=
800
L=1, v_s=2, v_c=4, v_e=1, acc =30 ,dec=40,jerk=800
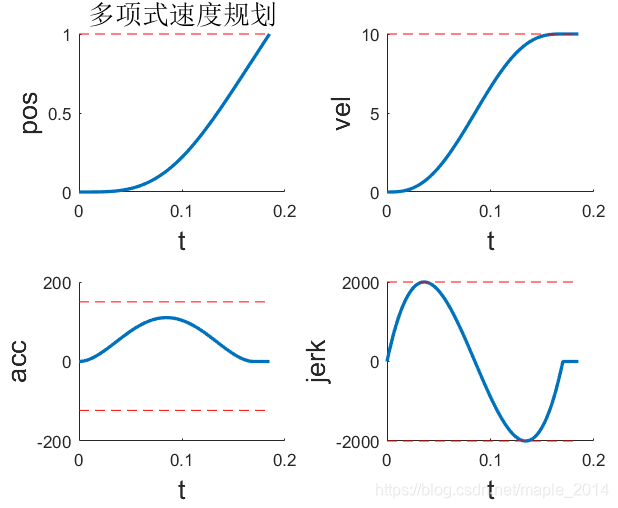
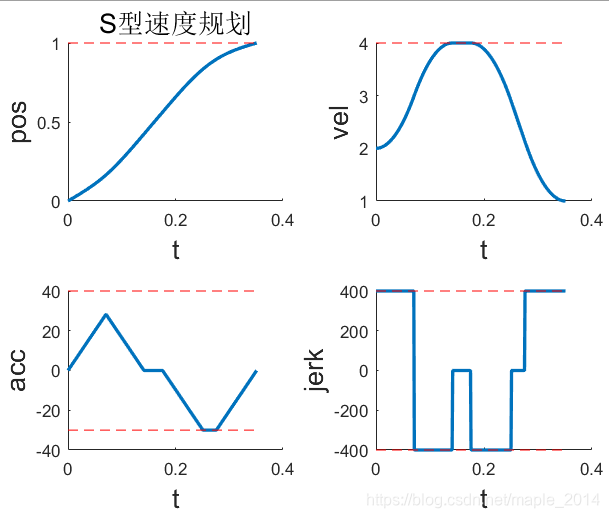
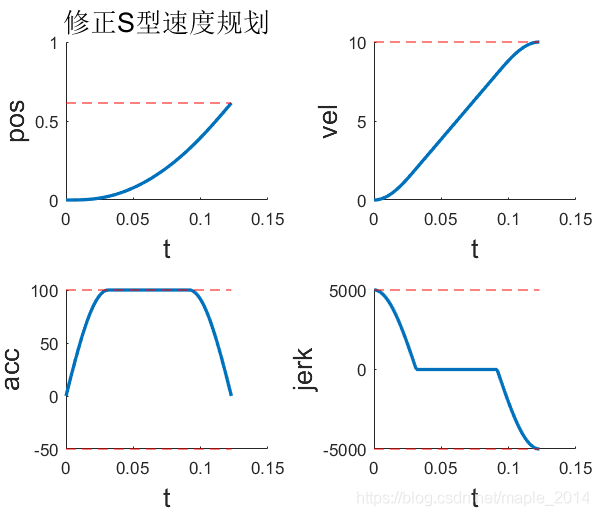
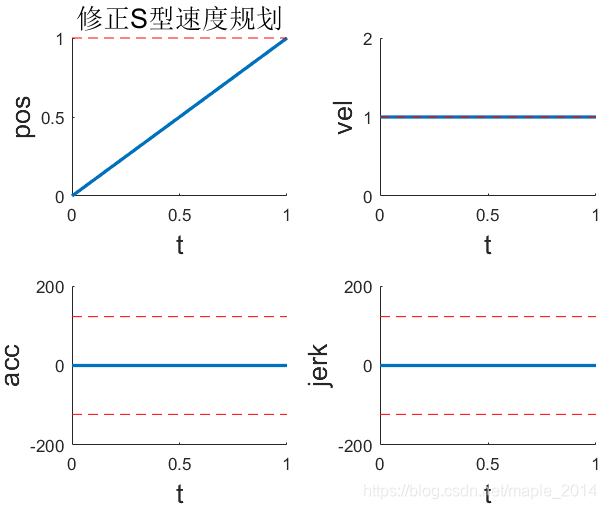
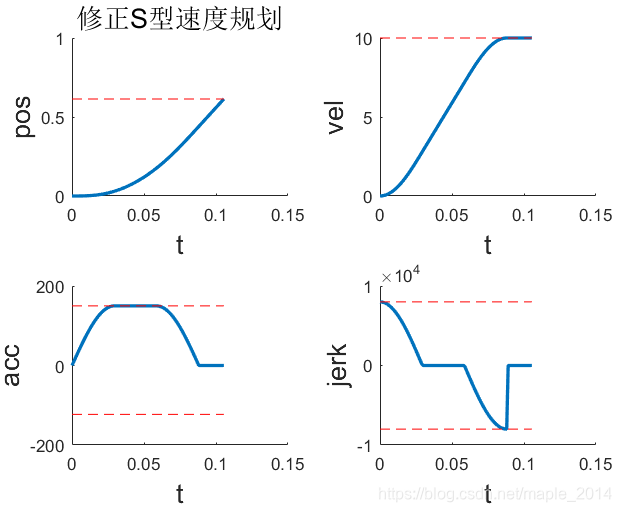
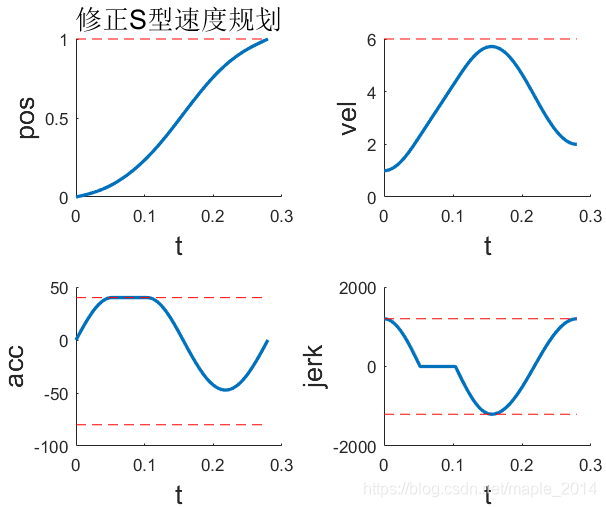
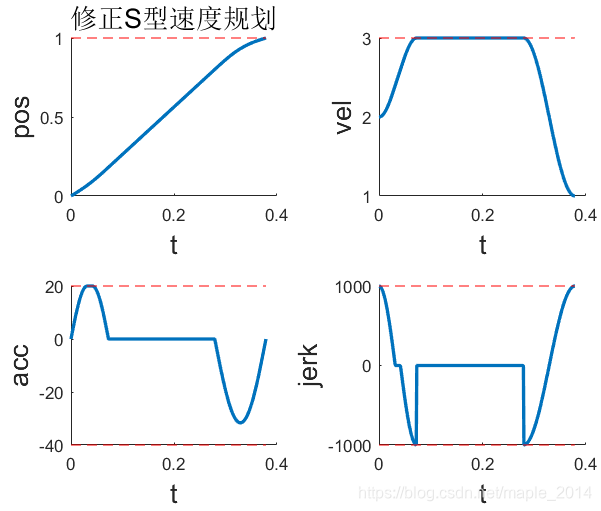
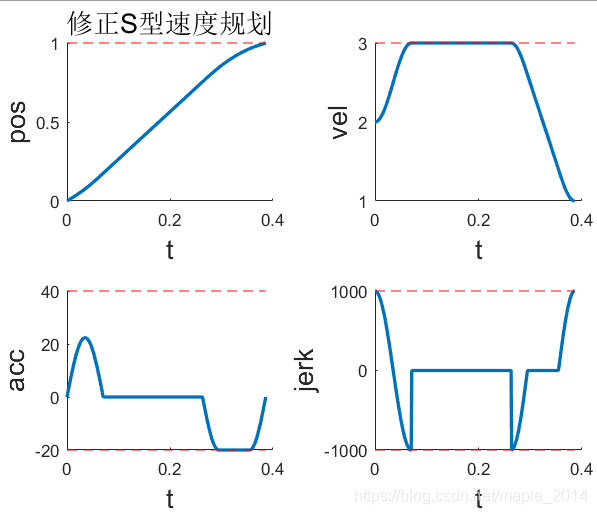
L=1,vs=2,vc=4,ve=1,acc=30,dec=40,jerk=800 (1) 位置平滑,速度平滑,加速度连续但不够平滑,二次加速度跳变; (2) 速度、加速度、二次加速度可控,更高阶不可控; (3) 规划时间较短; (4) 算法稍复杂、计算量稍大。 5.1 只有加速段 5.1.1 无匀加速段
L
=
0.496729413289805
,
v
s
=
0
,
v
c
=
10
,
v
e
=
10
,
a
c
c
=
200
,
d
e
c
=
123
(
任
意
)
,
j
e
r
k
=
5000
L=0.496729413289805, v_s=0, v_c=10, v_e=10, acc =200 ,dec=123(任意),jerk=5000
L=0.496729413289805,vs=0,vc=10,ve=10,acc=200,dec=123(任意),jerk=5000
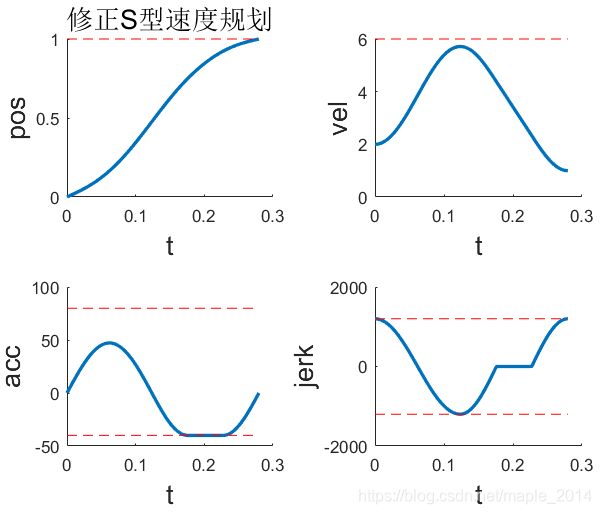
L
=
0.614159265358979
,
v
s
=
0
,
v
c
=
10
,
v
e
=
10
,
a
c
c
=
100
,
d
e
c
=
123
(
任
意
)
,
j
e
r
k
=
5000
L=0.614159265358979, v_s=0, v_c=10, v_e=10, acc =100 ,dec=123(任意),jerk=5000
L=0.614159265358979,vs=0,vc=10,ve=10,acc=100,dec=123(任意),jerk=5000
L
=
1
,
v
s
=
1
,
v
c
=
1
,
v
e
=
1
,
a
c
c
=
123
(
任
意
)
,
d
e
c
=
123
(
任
意
)
,
j
e
r
k
=
123
(
任
意
)
L=1, v_s=1, v_c=1, v_e=1, acc =123(任意), dec=123(任意), jerk=123(任意)
L=1,vs=1,vc=1,ve=1,acc=123(任意),dec=123(任意),jerk=123(任意)
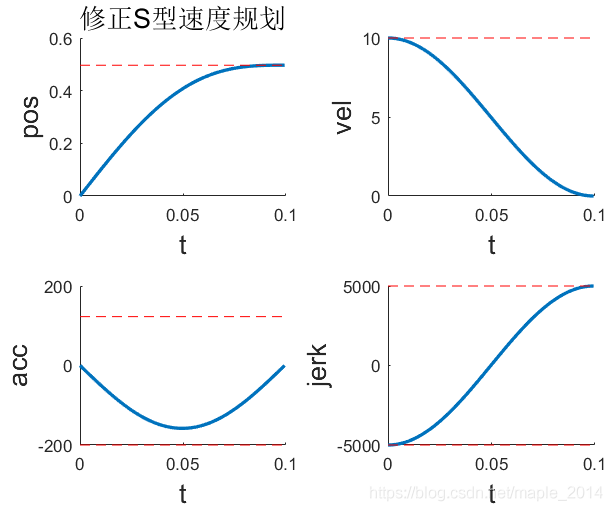
L
=
0.496729413289805
,
v
s
=
10
,
v
c
=
10
,
v
e
=
0
,
a
c
c
=
123
(
任
意
)
,
d
e
c
=
200
,
j
e
r
k
=
5000
L=0.496729413289805, v_s=10, v_c=10, v_e=0, acc =123(任意),dec=200,jerk=5000
L=0.496729413289805,vs=10,vc=10,ve=0,acc=123(任意),dec=200,jerk=5000
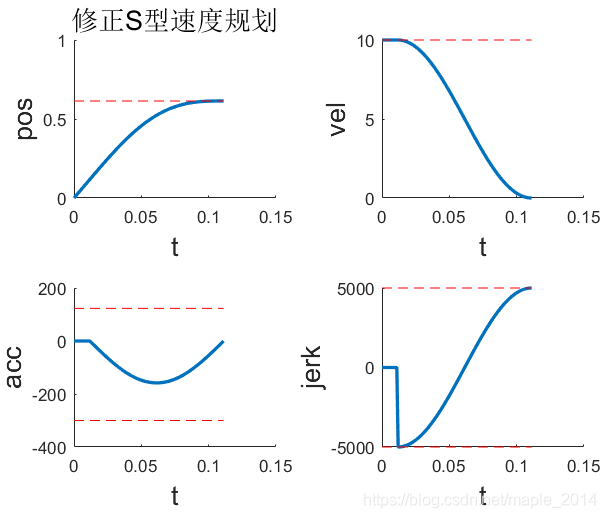
L
=
0.614159265358979
,
v
s
=
10
,
v
c
=
10
,
v
e
=
0
,
a
c
c
=
123
(
任
意
)
,
d
e
c
=
100
,
j
e
r
k
=
5000
L=0.614159265358979, v_s=10, v_c=10, v_e=0, acc =123(任意) ,dec=100,jerk=5000
L=0.614159265358979,vs=10,vc=10,ve=0,acc=123(任意),dec=100,jerk=5000
L
=
0.61415926
,
v
s
=
0
,
v
c
=
10
,
v
e
=
10
,
a
c
c
=
300
,
d
e
c
=
123
(
任
意
)
,
j
e
r
k
=
5000
L=0.61415926, v_s=0, v_c=10, v_e=10, acc =300 ,dec=123(任意),jerk=5000
L=0.61415926,vs=0,vc=10,ve=10,acc=300,dec=123(任意),jerk=5000
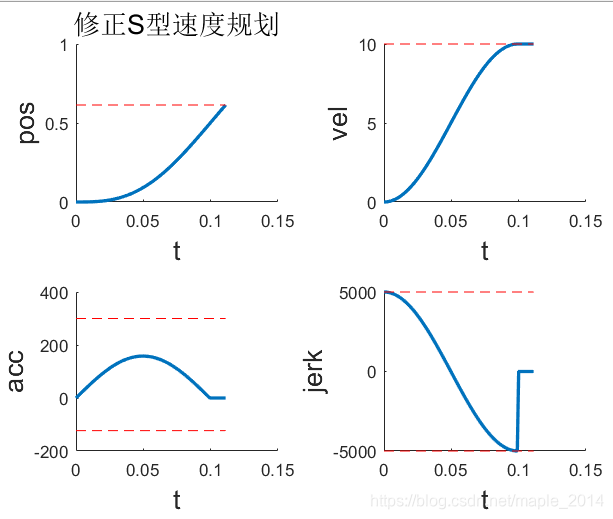
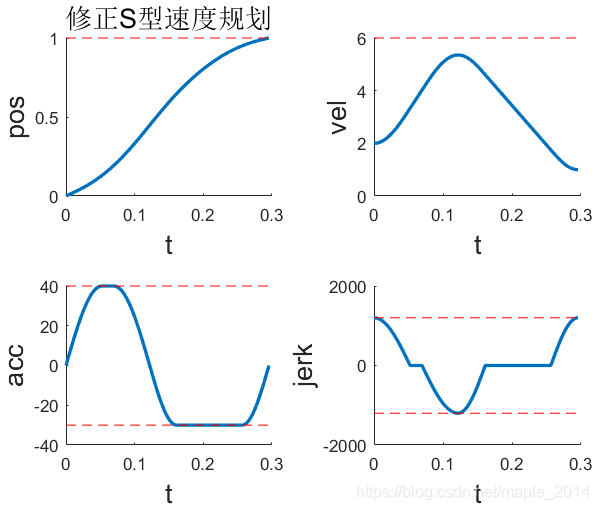
L
=
0.61415926
,
v
s
=
0
,
v
c
=
10
,
v
e
=
10
,
a
c
c
=
150
,
d
e
c
=
123
(
任
意
)
,
j
e
r
k
=
8000
L=0.61415926, v_s=0, v_c=10, v_e=10, acc =150 ,dec=123(任意),jerk=8000
L=0.61415926,vs=0,vc=10,ve=10,acc=150,dec=123(任意),jerk=8000
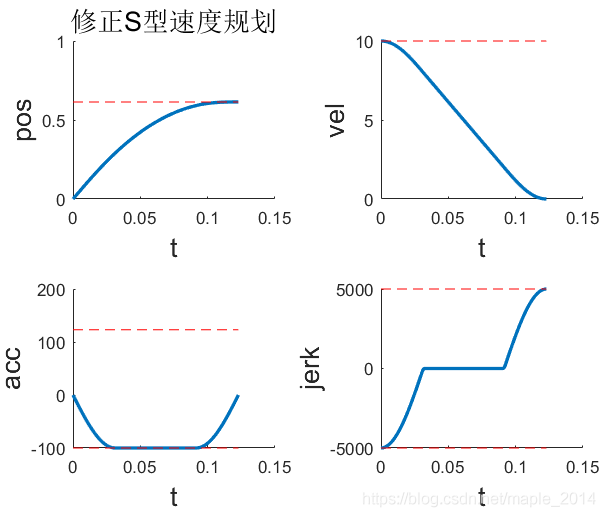
L
=
0.61415926
,
v
s
=
10
,
v
c
=
10
,
v
e
=
0
,
a
c
c
=
123
(
任
意
)
,
d
e
c
=
300
,
j
e
r
k
=
5000
L=0.61415926, v_s=10, v_c=10, v_e=0, acc =123(任意) ,dec=300,jerk=5000
L=0.61415926,vs=10,vc=10,ve=0,acc=123(任意),dec=300,jerk=5000
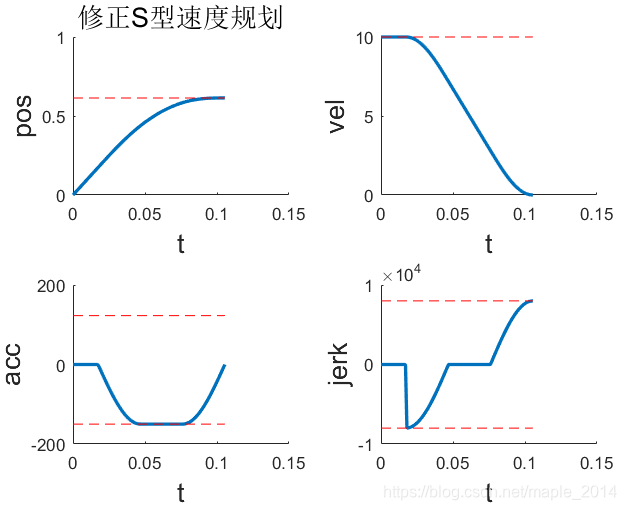
L
=
0.61415926
,
v
s
=
10
,
v
c
=
10
,
v
e
=
0
,
a
c
c
=
123
(
任
意
)
,
d
e
c
=
150
,
j
e
r
k
=
8000
L=0.61415926, v_s=10, v_c=10, v_e=0, acc =123(任意) ,dec=150,jerk=8000
L=0.61415926,vs=10,vc=10,ve=0,acc=123(任意),dec=150,jerk=8000
L
=
1
,
v
s
=
1
,
v
c
=
6
,
v
e
=
2
,
a
c
c
=
60
,
d
e
c
=
80
,
j
e
r
k
=
500
L=1, v_s=1, v_c=6, v_e=2, acc =60 ,dec=80,jerk=500
L=1,vs=1,vc=6,ve=2,acc=60,dec=80,jerk=500
L
=
1
,
v
s
=
1
,
v
c
=
6
,
v
e
=
2
,
a
c
c
=
40
,
d
e
c
=
80
,
j
e
r
k
=
1200
L=1, v_s=1, v_c=6, v_e=2, acc =40 ,dec=80,jerk=1200
L=1,vs=1,vc=6,ve=2,acc=40,dec=80,jerk=1200
L
=
1
,
v
s
=
2
,
v
c
=
6
,
v
e
=
1
,
a
c
c
=
80
,
d
e
c
=
40
,
j
e
r
k
=
1200
L=1, v_s=2, v_c=6, v_e=1, acc =80 ,dec=40,jerk=1200
L=1,vs=2,vc=6,ve=1,acc=80,dec=40,jerk=1200
L
=
1
,
v
s
=
2
,
v
c
=
6
,
v
e
=
1
,
a
c
c
=
40
,
d
e
c
=
30
,
j
e
r
k
=
1200
L=1, v_s=2, v_c=6, v_e=1, acc =40 ,dec=30,jerk=1200
L=1,vs=2,vc=6,ve=1,acc=40,dec=30,jerk=1200
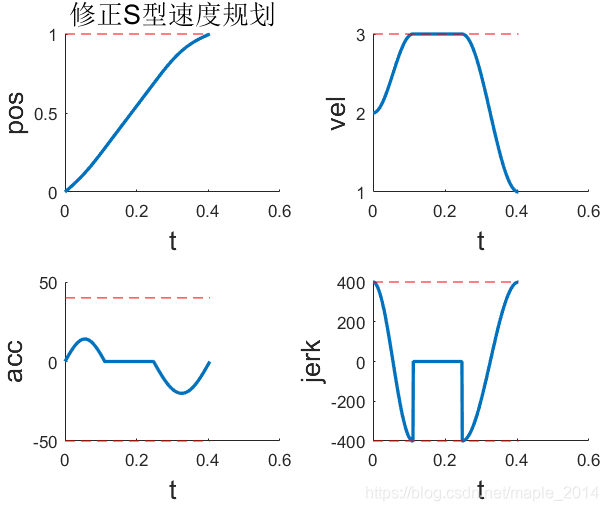
L
=
1
,
v
s
=
2
,
v
c
=
3
,
v
e
=
1
,
a
c
c
=
40
,
d
e
c
=
50
,
j
e
r
k
=
400
L=1, v_s=2, v_c=3, v_e=1, acc =40 ,dec=50,jerk=400
L=1,vs=2,vc=3,ve=1,acc=40,dec=50,jerk=400
L
=
1
,
v
s
=
2
,
v
c
=
3
,
v
e
=
1
,
a
c
c
=
20
,
d
e
c
=
40
,
j
e
r
k
=
1000
L=1, v_s=2, v_c=3, v_e=1, acc =20 ,dec=40,jerk=1000
L=1,vs=2,vc=3,ve=1,acc=20,dec=40,jerk=1000
L
=
1
,
v
s
=
2
,
v
c
=
3
,
v
e
=
1
,
a
c
c
=
40
,
d
e
c
=
20
,
j
e
r
k
=
1000
L=1, v_s=2, v_c=3, v_e=1, acc =40 ,dec=20,jerk=1000
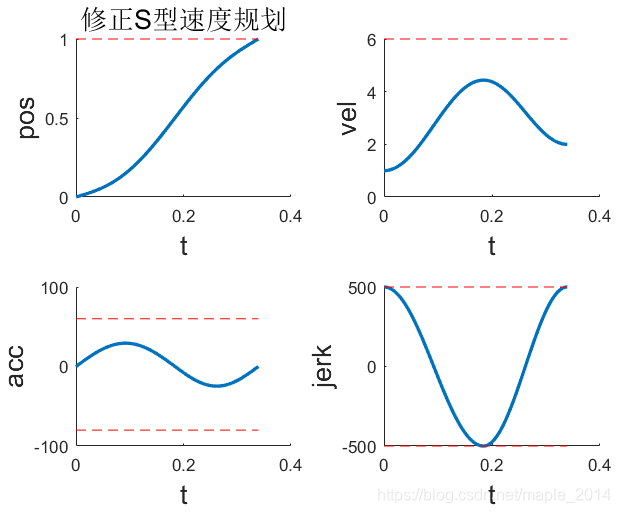
L=1,vs=2,vc=3,ve=1,acc=40,dec=20,jerk=1000
L
=
1
,
v
s
=
2
,
v
c
=
4
,
v
e
=
1
,
a
c
c
=
30
,
d
e
c
=
40
,
j
e
r
k
=
3000
L=1, v_s=2, v_c=4, v_e=1, acc =30 ,dec=40,jerk=3000
L=1,vs=2,vc=4,ve=1,acc=30,dec=40,jerk=3000
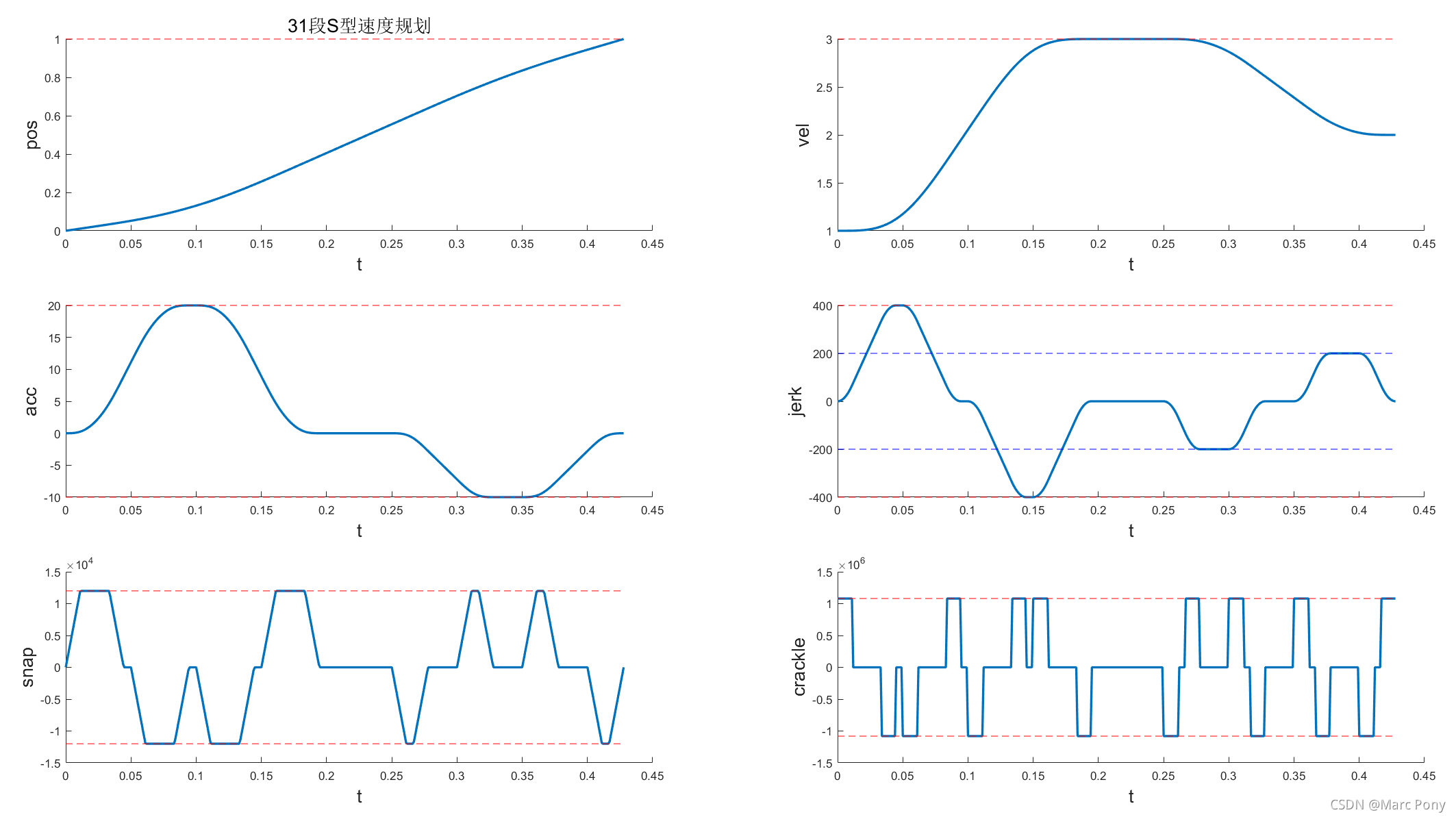
(1) 位置平滑,速度平滑,加速度平滑,二次加速度连续但不平滑,三次加速度跳变; (2) 速度、加速度、二次加速度、三次加速度可控,四次加速度不可控; (3) 规划时间稍长; (4) 算法较复杂、计算量较大。 7、31段S型速度规划
(1) 位置平滑,速度平滑,加速度平滑,二次加速度平滑,三次加速度连续但不平滑,四次加速度跳变; (2) 位置的各阶导皆可控; (3) 规划时间稍长; (4) 算法较复杂、计算量较大。 总体来说: 连续性与平滑性:31段S型 > > > 多项式 ≈ \approx ≈ 15段S型 > > > 7段修正S型 > > > 余弦 > > > 7段S型 > > > 梯形; 可控性:31段S型 > > > 15段S型 > > > 7段修正S型 = = = 7段S型 = = = 多项式 > > > 余弦 = = = 梯形; 规划总时间:多项式 > > > 余弦 > > > 31段S型 > > > 15段S型 > > > 7段修正S型 > > > 7段S型 > > > 梯形; 算法计算量:31段S型 > > > 15段S型 > > > 7段修正S型 > > > 7段S型 > > > 多项式 ≈ \approx ≈ 余弦 > > > 梯形。 根据以上的对比,7种速度规划算法大致可分为低中高端三档。 低档:梯形、余弦(普通学者,自身“阶数”较低,专业技能浮于表面,自律能力较差) 中档:多项式、7段S型、7段修正S型(专家,自身“阶数”较高,专业技能深入,需要深入了解才能知道其学术造诣之深,自律能力强) 高档:15段S型、31段S型(大师,自身“阶数”高,专业技能出神入化,需要一定造诣的人深入洞悉才能领悟其所思所为之精妙,自律能力非常人所能及) 二、7种速度规划示例演示 笔者采用统一的框架实现了以上7种速度规划算法,所有核心算法均用c语言实现,不调用第三方算法库,采用QT实现图形用户界面。下载链接:robot_velocity_planning _V2.0.rar。下面是示例演示,取长度
L
=
300
L=300
L=300,起始速度
v
s
=
100
v_s = 100
vs=100,结束速度
v
e
=
200
v_e = 200
ve=200,最大速度
v
c
=
500
v_c = 500
vc=500,加速度
a
c
c
=
2000
acc = 2000
acc=2000,减速度
d
e
c
=
3000
dec = 3000
dec=3000,二次加速度
j
e
r
k
=
50000
jerk = 50000
jerk=50000,三次加速度
s
n
a
p
=
3000000
snap = 3000000
snap=3000000,四次加速度
c
r
a
c
k
l
e
=
500000000
crackle = 500000000
crackle=500000000。 |














【本文地址】
今日新闻 |
推荐新闻 |